


ექვსღერძიანი კოლაბორაციული რობოტის ხრახნების დამჭიმავი მანქანა

მოწყობილობის პარამეტრი
| მოდელი | GR-XFXZ950 |
| რობოტის მიღწევა | 950 მმ |
| რობოტის საბოლოო დატვირთვა | 16 კგ |
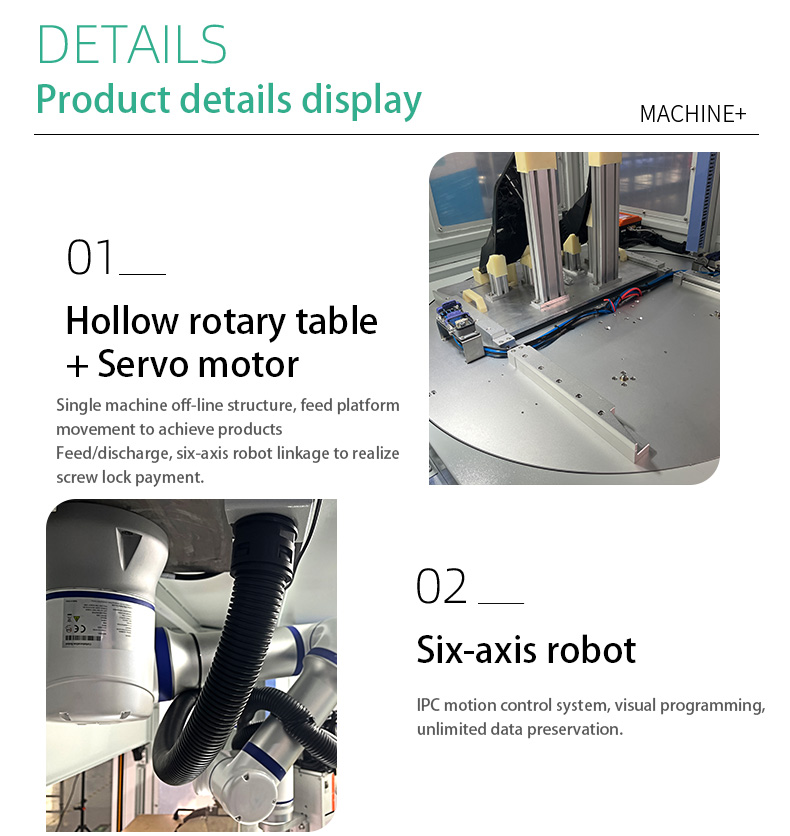
| კვების პლატფორმა | ცენტრალური მართვის მბრუნავი მაგიდა + სერვოძრავა |
| კვების მეთოდი | Blow/a spirate თავსებადია |
| დაბლოკვის შედეგად მიღებული შემოსავალი | 99.95% |
| მომუშავე კვების წყარო | AC220V |
| სამუშაო ჰაერის წყარო | 0.4-0.7 მპა |
| ძალა | დაახლოებით 2.5 კვტ |
| კოორდინატის მეთოდის დაყენება | ვიზუალური პოზიციონირება |
| გარე განზომილება (სიგრძე*სიგანე*სიმაღლე) | 1400*1900*1950 მმ |
| წონა (კგ) | 800 |
| მდგომარეობა | ახალი |
| ძირითადი კომპონენტების გარანტია | 2 წელი |
მოწყობილობის მახასიათებლები
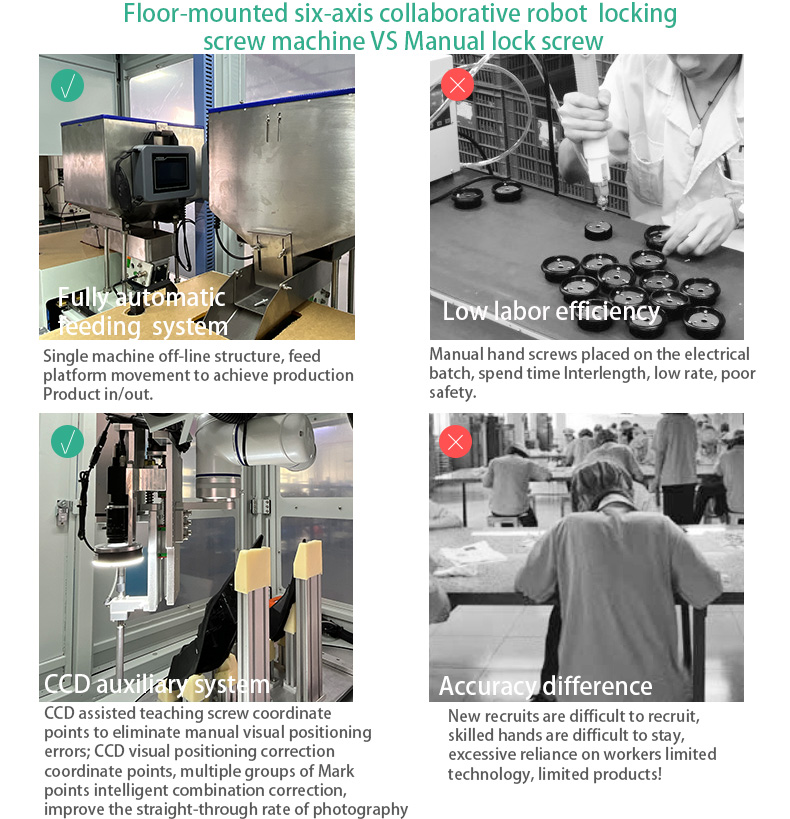
1. ერთმანქანიანი ოფლაინ სტრუქტურა, მიწოდების პლატფორმის მოძრაობა პროდუქტის შეყვანის/გამოყვანის მისაღწევად, ექვსღერძიანი რობოტის შეერთება ხრახნიანი საკეტის გადახდის მისაღწევად
2.IPC მოძრაობის კონტროლის სისტემა, ვიზუალური პროგრამირება, შეუზღუდავი მონაცემთა შენახვა;
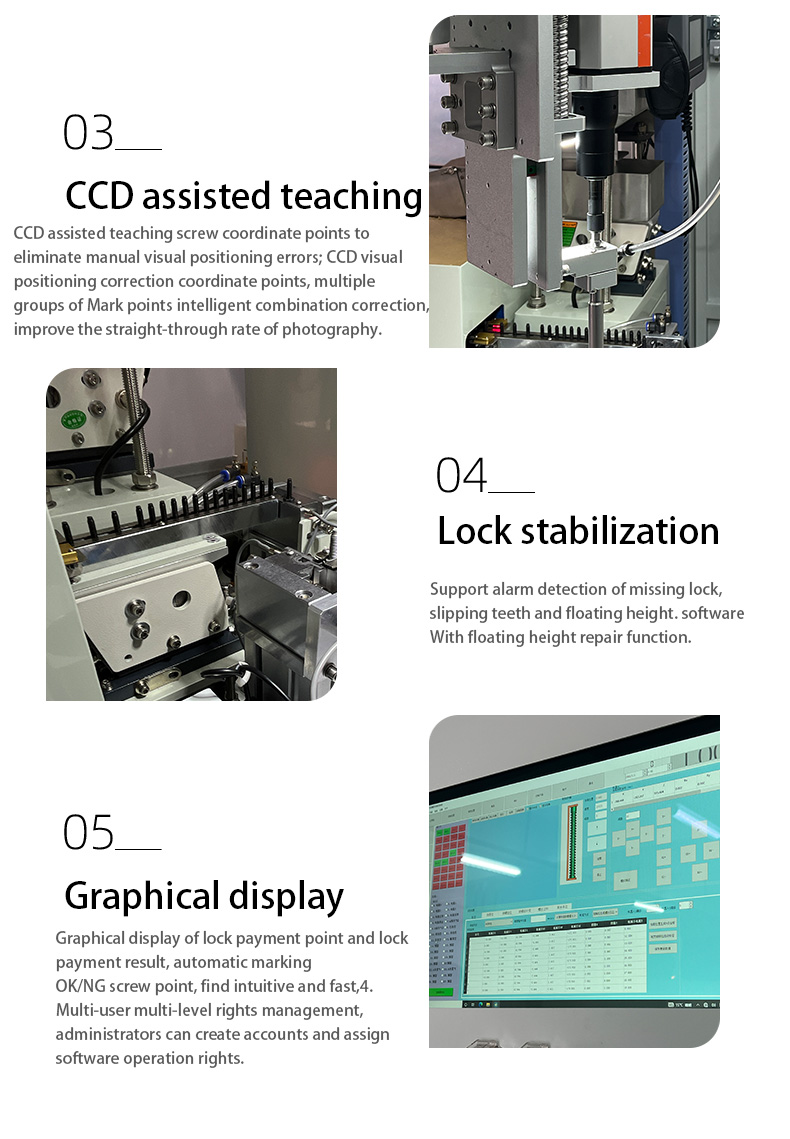
3. დაბლოკვის გადახდის წერტილის და დაბლოკვის გადახდის შედეგის გრაფიკული ჩვენება, ხრახნის წერტილის ავტომატური მონიშვნა OK/NG, ინტუიციური და სწრაფი პოვნა;
4.. მრავალმომხმარებლიანი და მრავალდონიანი უფლებების მართვა, ადმინისტრატორებს შეუძლიათ ანგარიშების შექმნა და პროგრამული უზრუნველყოფის ექსპლუატაციის უფლებების მინიჭება
5. CCD-ის დახმარებით ხრახნიანი კოორდინატების წერტილების სწავლება ვიზუალური პოზიციონირების შეცდომების აღმოსაფხვრელად; CCD ვიზუალური პოზიციონირების კორექციის კოორდინატების წერტილები, მარკირების წერტილების მრავალი ჯგუფი ინტელექტუალური კომბინაციის კორექცია, აუმჯობესებს ფოტოს გავლის მაჩვენებელს;
6. დაკარგული საკეტის, კბილების ცურვის და მაღლა ცურვის სიგნალიზაციის აღმოჩენა. პროგრამული უზრუნველყოფა აღჭურვილია ცურვადი სიმაღლის შეკეთების ფუნქციით;
7. Z-ღერძის კონფიგურაცია შესაძლებელია ლაზერული გადაადგილების სენსორით (მცურავი სიმაღლის გასაზომად) და დაღმავალი წნევის აღმოჩენის სენსორით (არასავალდებულო);
8. ელექტრო პარტია შეიძლება აღჭურვილი იყოს HIOS ელექტრო პარტიით, Qili სიჩქარის ელექტრო პარტიით, სერვო ელექტრო პარტიით, ინტელექტუალური ელექტრო პარტიით და ა.შ. (სურვილისამებრ);
9. აღჭურვილობას შეუძლია MES-ის ატვირთვა მომხმარებლის მოთხოვნების შესაბამისად, როგორიცაა ბრუნვის მომენტი, ბრუნვების რაოდენობა, კუთხე, ბრუნვის მომენტის მრუდი, დაბლოკვის სტატუსი.
10. შესაძლებელია ხელით და ავტომატური სკანირების არჩევა (სურვილისამებრ)
11.. წარმოების მონაცემების თვალყურის დევნება შესაძლებელია და პროგრამულ უზრუნველყოფას მოყვება ხარისხის კონტროლის დაფა. ყველა სახის მონაცემის ატვირთვა და ჩამოტვირთვა შესაძლებელია (არასავალდებულო);
12. ბრუნვის წერტილის ავტომატური შემოწმება, ბრუნვის წერტილის შემოწმების შედეგების შენახვა და მოთხოვნა (არასავალდებულო).

დეტალები


პროდუქტების კატეგორიები
-

მხარზე მხარზე ადსორბციული ტიპის ხრახნიანი მჭიდრო...
-

ზურგით ზურგით ხრახნების გამკაცრების მანქანა
-

მაგიდის ზედაპირის ორმაგი სადგურის ხრახნიანი გამკაცრების მანქანა
-

ვერტიკალური ორმაგი სადგურის ადსორბციის ტიპის ხრახნიანი T...
-

ჰაერის დარტყმის ტიპის ხრახნიანი გამკაცრების მანქანა
-

ვერტიკალური ორმაგი სადგურის ხრახნიანი გამკაცრების მანქანა





